Robot Dog V2


Présentation
Robot Dog V2 est un robot quadrupède conçu entièrement de zéro.
Son objectif est de proposer une utilisation aussi simple que possible, tout en s’intégrant dans un écosystème robotique complet. Ce projet a été pensé comme une plateforme d’expérimentation permettant à son concepteur d’explorer l’ensemble des aspects de la robotique, de la mécanique à l’électronique, en passant par le logiciel et le contrôle du mouvement.
Visualisation 3D
Appréhender le robot comme si vous le possédiez déjà
Pour une meilleure expérience, utilisez un navigateur Chrome (ex. Chrome, Brave) et activez les cookies
La technique au service de l’innovation
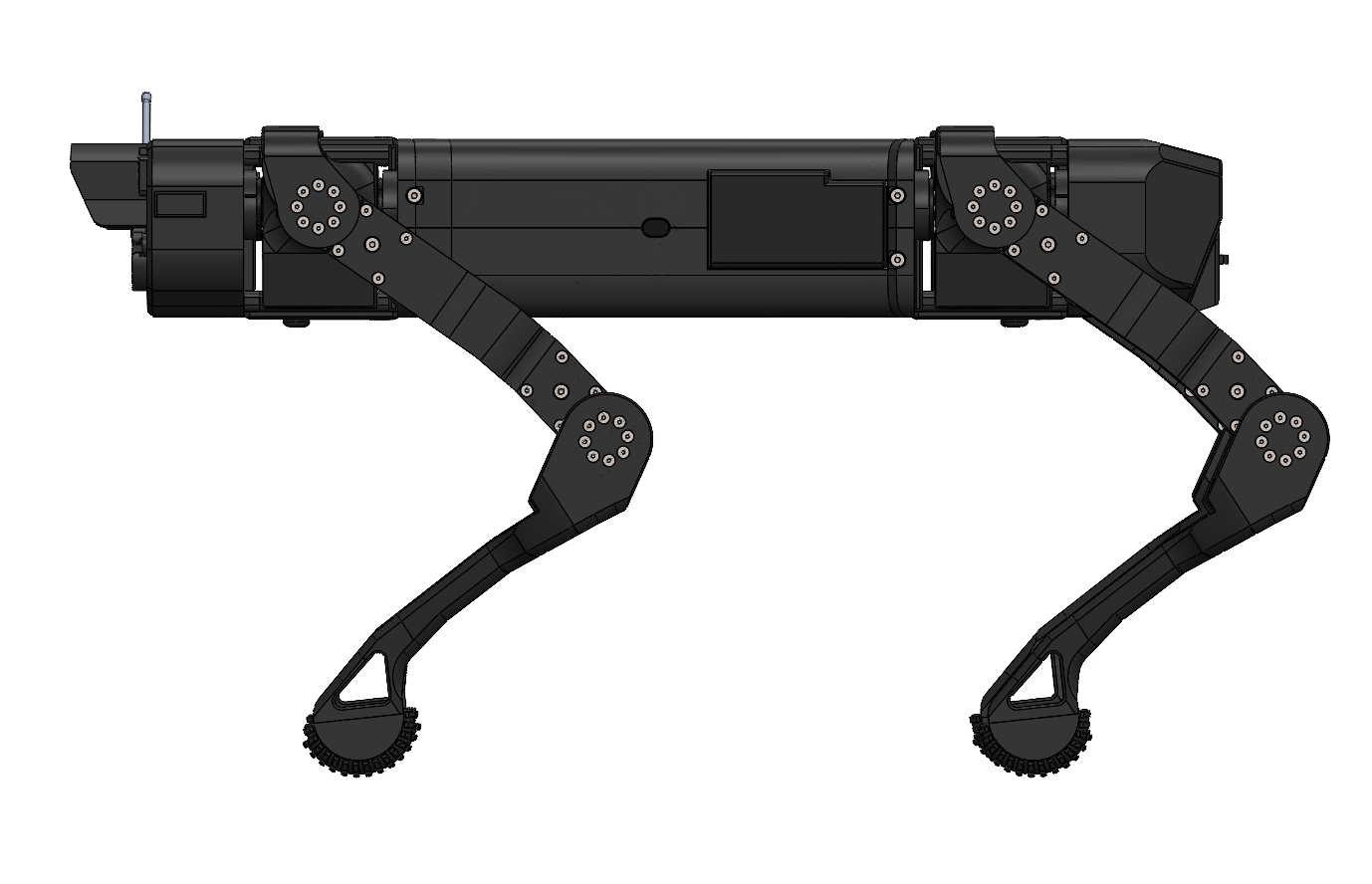
Motorisation
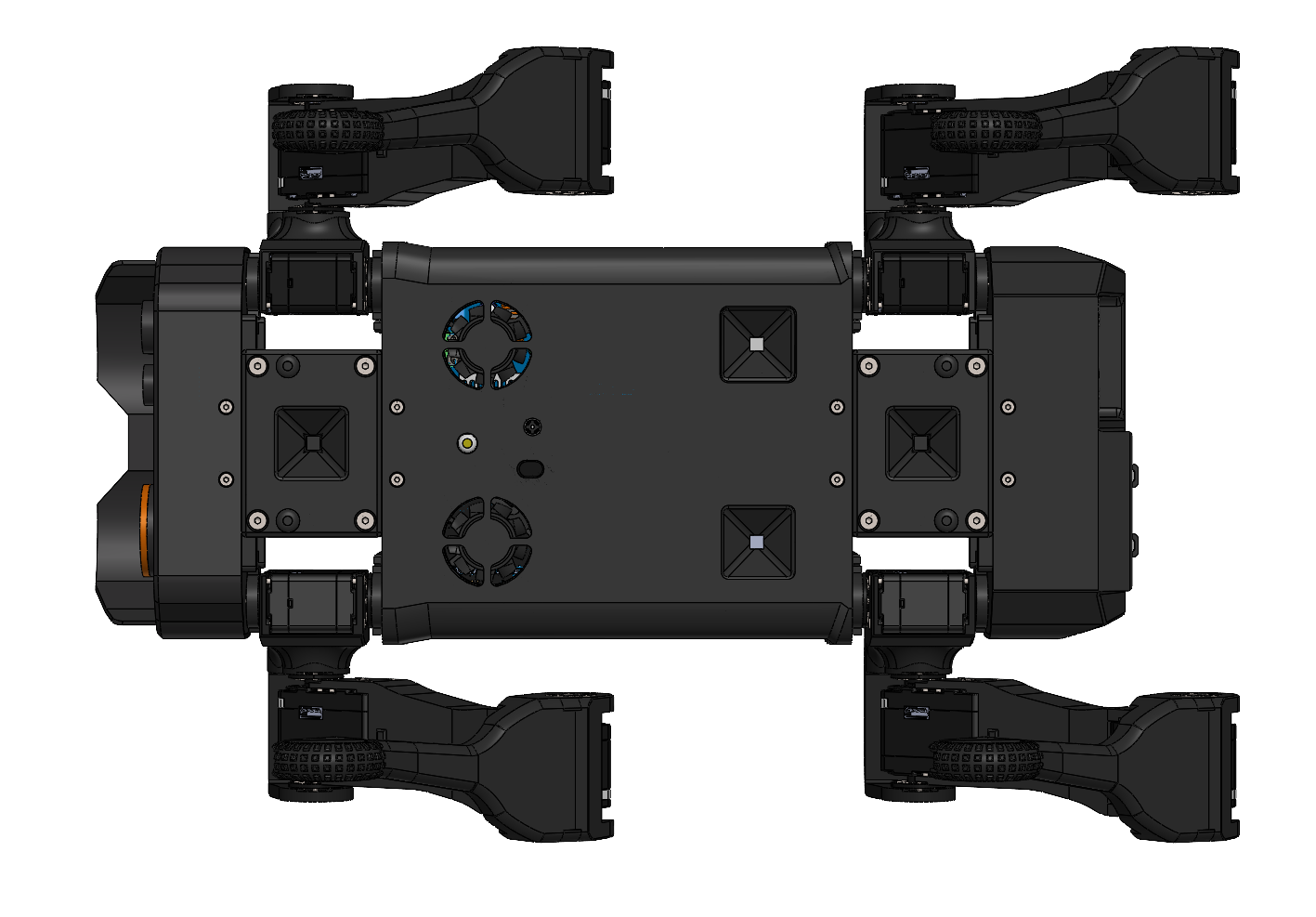
Une architecture articulée autour de 12 actionneurs précis et « intelligents ». La disposition des moteurs (en jaune) permet une gestion de la cinématique inverse en temps réel pour assurer la stabilité du châssis sur tous les terrains.
Puissance brute. Contrôle dynamique.
Capteurs
Le système s’appuie sur une fusion de données multisectorielle (en vert). L’intégration de capteurs de distance et d’une centrale inertielle permet une connaissance de son environnement et une correction d’assiette instantanée face aux obstacles.
Perception active. Stabilité continue.
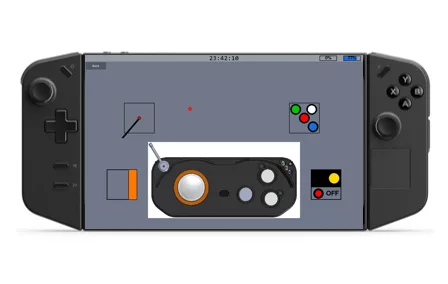
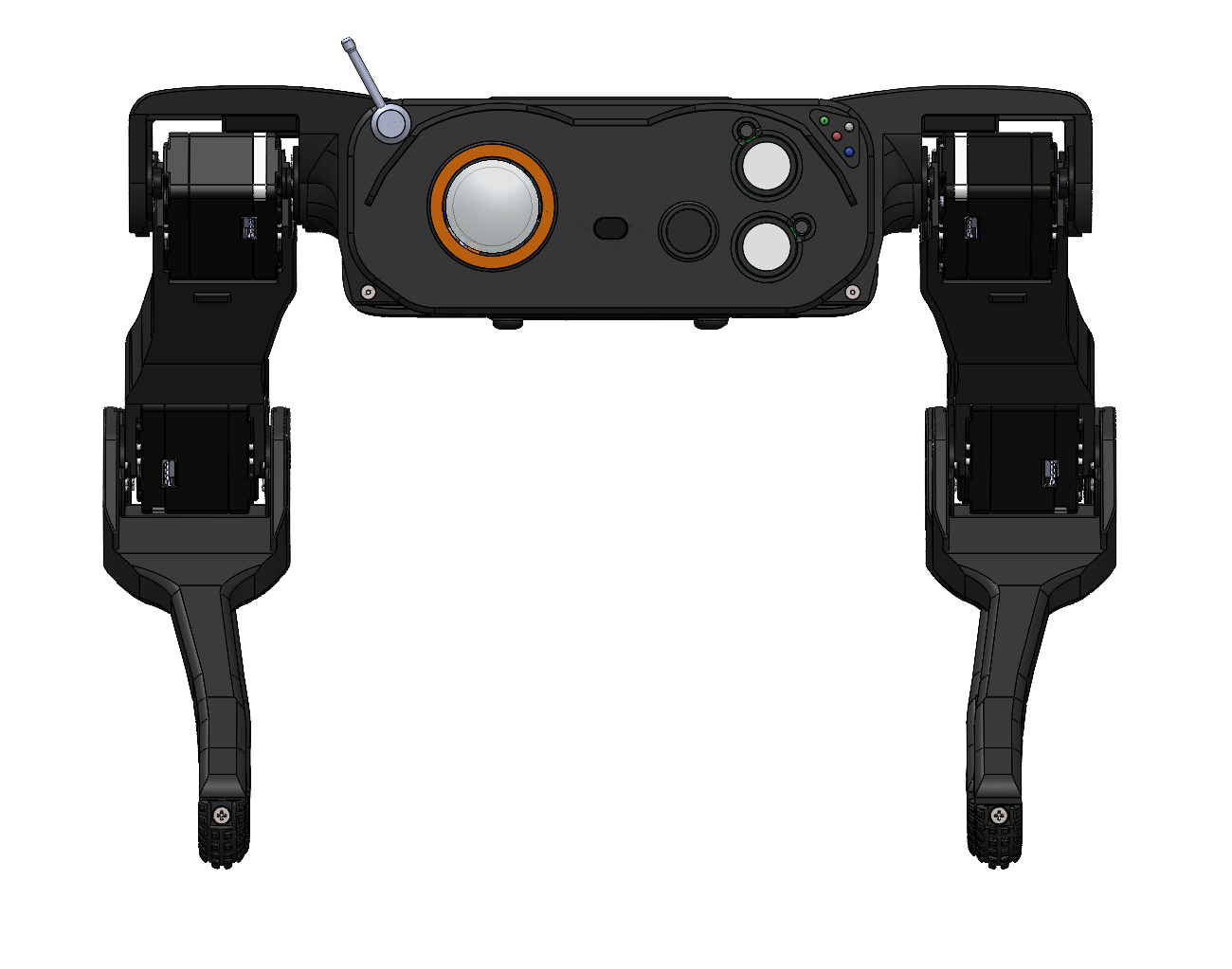
Un robot vivant
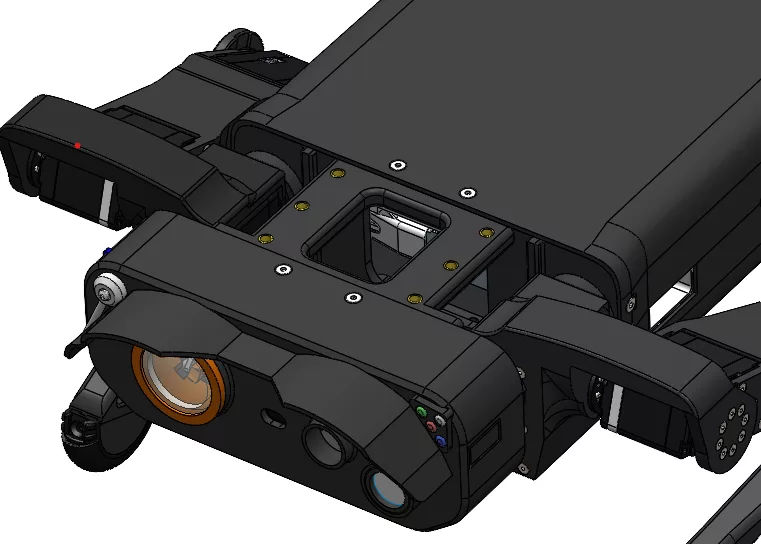
Ce module centralise la vision et l’interactivité. Il embarque une caméra grand angle avec vision nocturne et un capteur de distance. L’interaction est gérée par des éléments mécaniques mobiles : un zoom simulé, un laser rétractable et une antenne rotative.
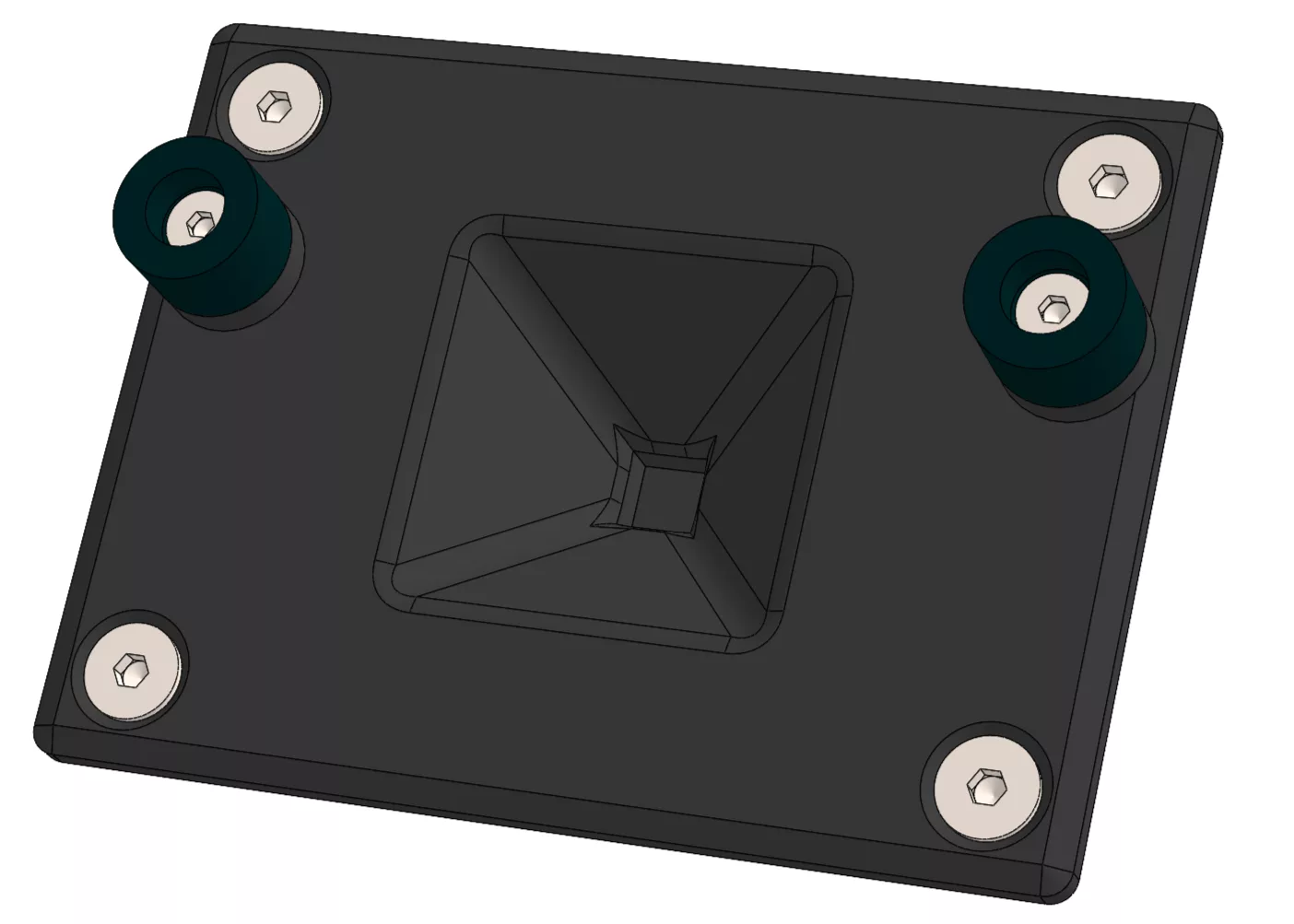
MultiMount
Système à 360°


Le châssis intègre quatre points d’ancrage universels (MultiMount) sur les faces supérieure et inférieure. Cette configuration permet l’ajout de modules complémentaires ou de charges utiles sans modification de la structure principale.
Accroches normalisées
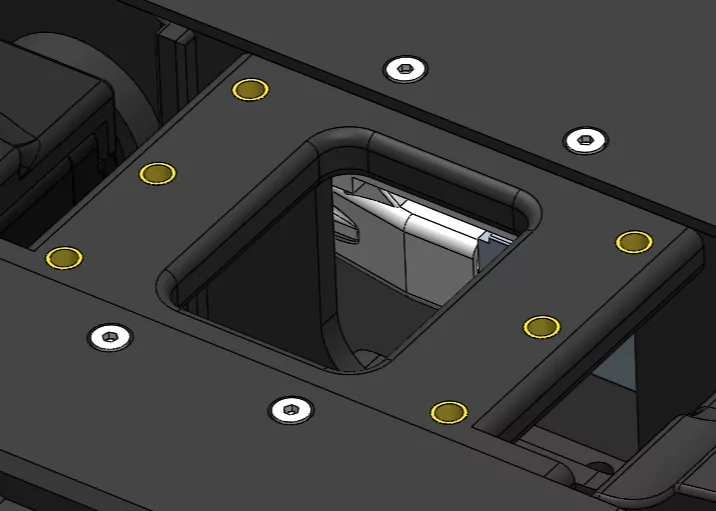
L’interface MultiMount a été conçue pour la robustesse et la polyvalence. Elle repose sur une empreinte à 6 points de fixation et un passage pour le routage de câbles, l’insertion de capteurs, etc.
Possibilités infinies
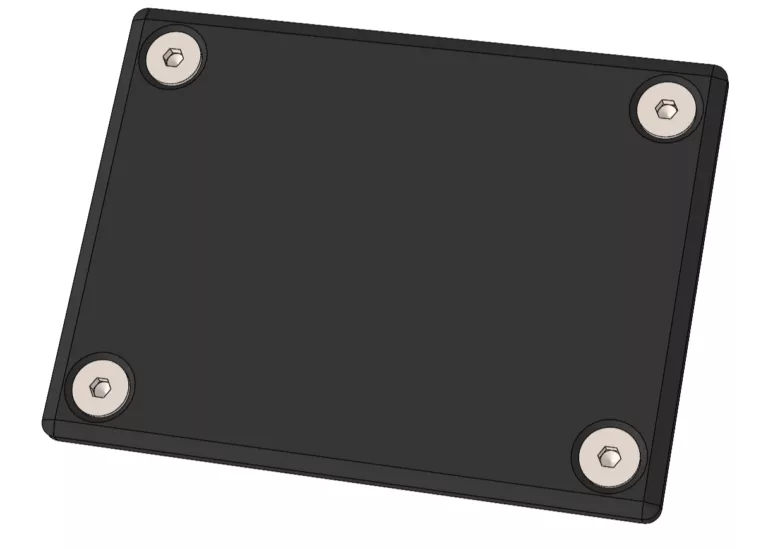
Cache simple

Intégration d’un bouton d’arrêt d’urgence
Support pour stand de charge et mallette
Alimentation flexible
Batteries interchangeables
The battery pack is designed for instant removal and replacement. This system allows the robot to be restarted immediately with a charged pack without opening the chassis.
Zero waiting. Direct swap.
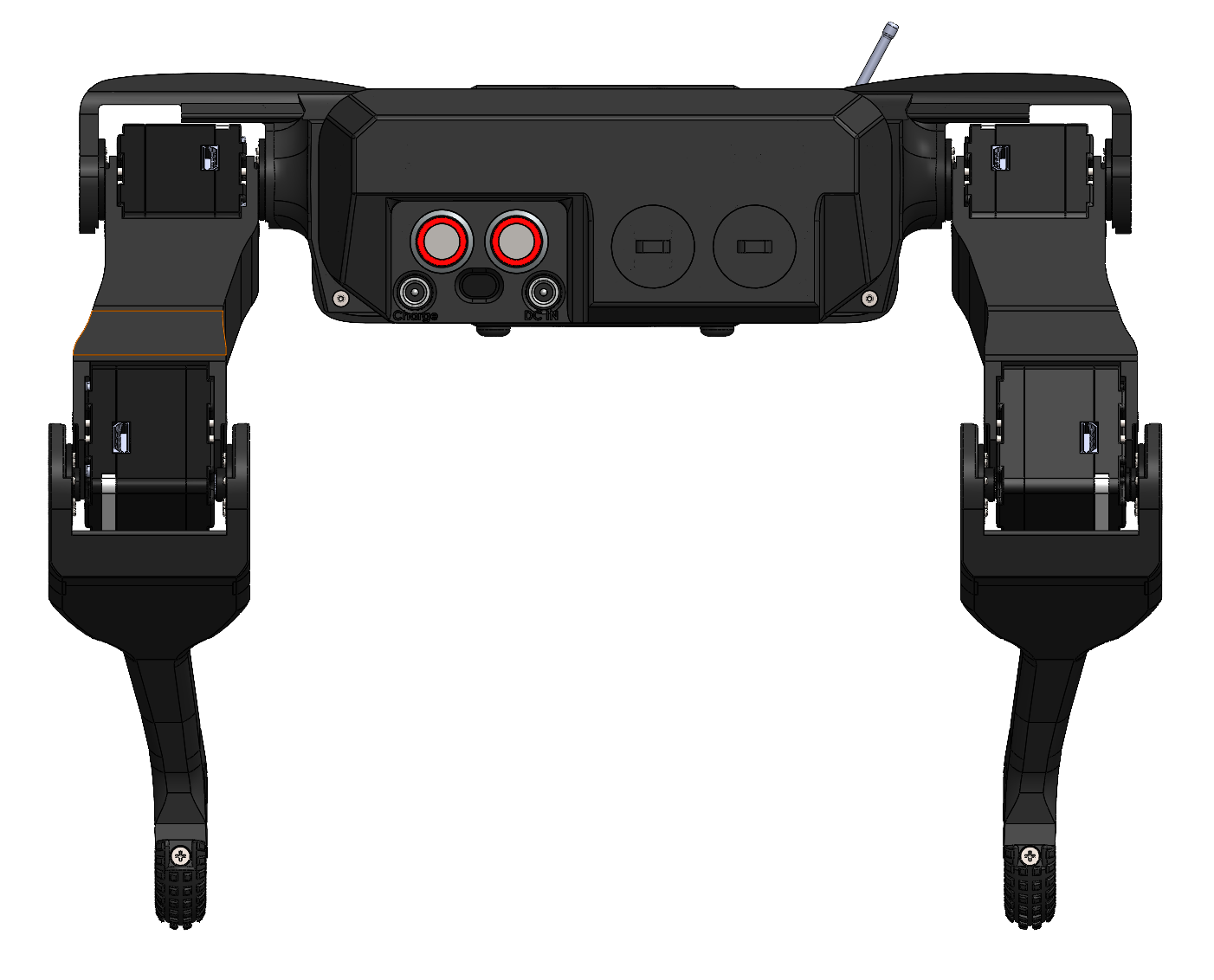
Alimentation filaire
The robot integrates two distinct inputs for direct energy management.
– Port de charge: Recharges the internal battery.
– Direct power: Use via mains for extended testing.
Hybrid management. Fixed or mobile use