Robot Dog V2


Overview
Robot Dog V2 is a quadruped robot designed entirely from scratch.
Its goal is to offer the simplest possible user experience while integrating seamlessly into a complete robotic ecosystem. This project was conceived as an experimental platform, allowing its creator to explore all aspects of robotics—from mechanics and electronics to software and motion control.
3D Visualization
Experience the robot as if you already owned it
For optimal performance, a Chromium browser (Chrome, Brave) and cookies are recommended.
Technology at the service of innovation
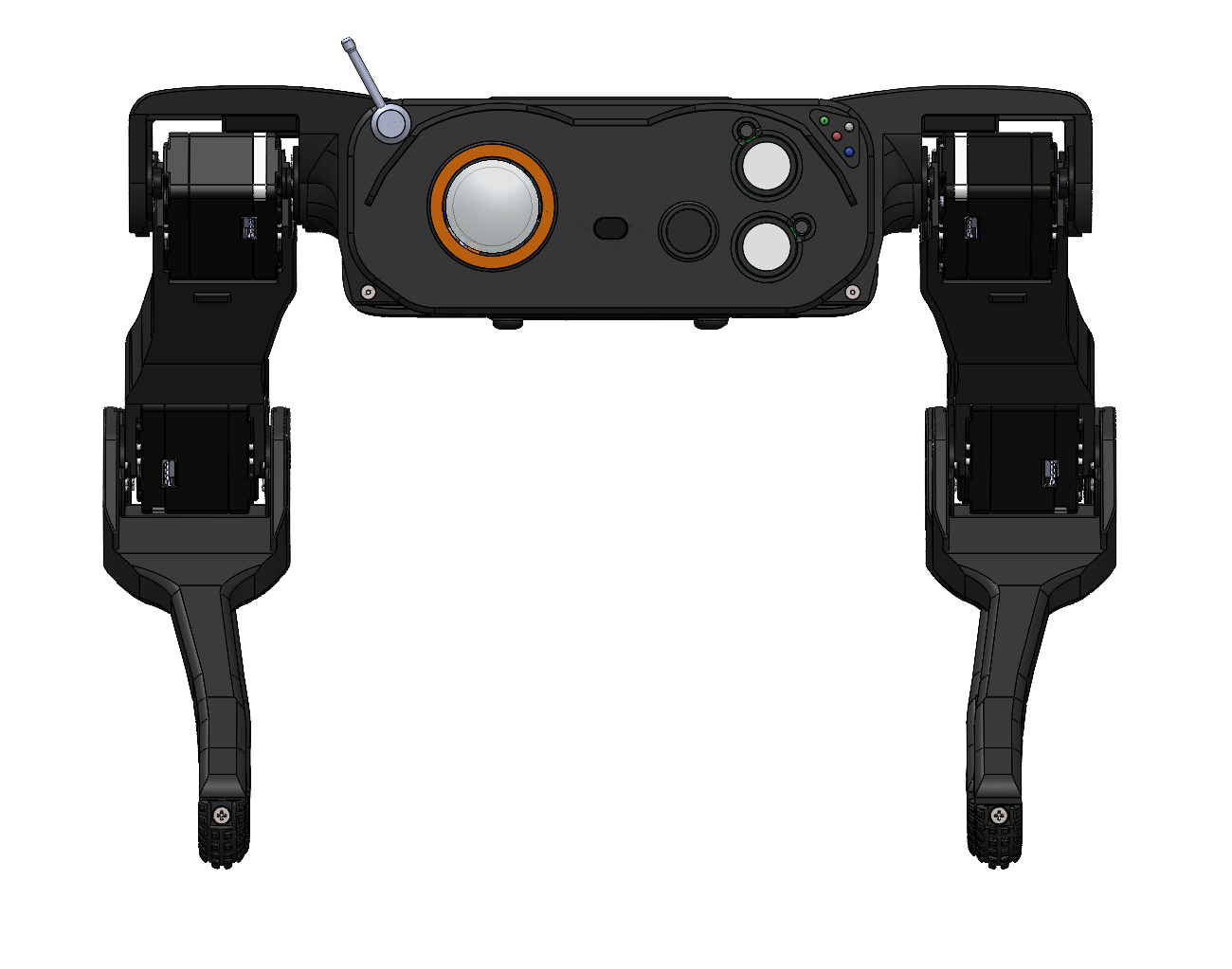
Motorization
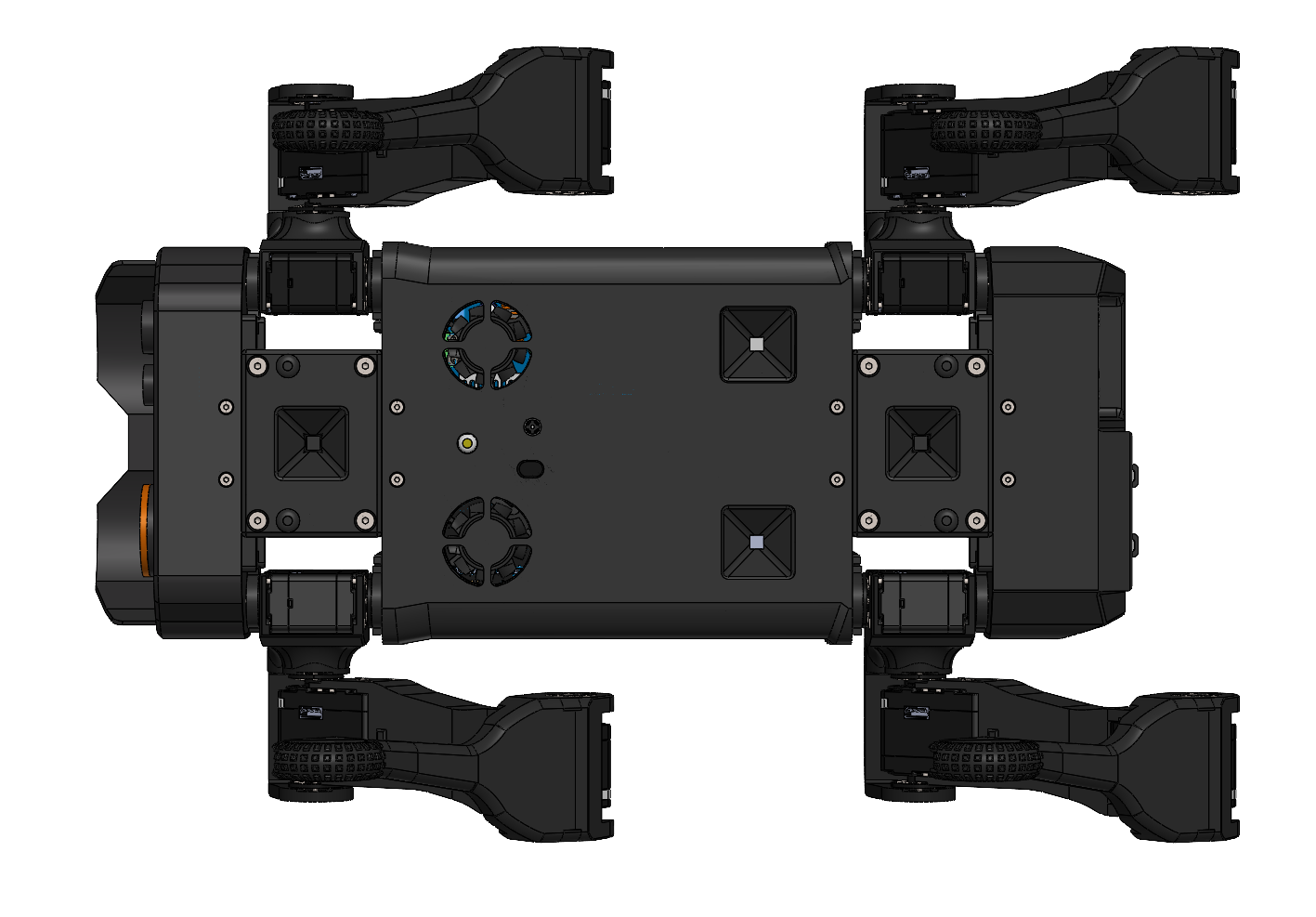
An architecture built around 12 precise and “intelligent” actuators. The arrangement of the motors (in yellow) enables real-time inverse kinematics management to ensure chassis stability on any terrain.
Raw power. Dynamic control.
Sensors
The system relies on multisector data fusion (in green). The integration of distance sensors and an inertial measurement unit provides environmental awareness and instant posture correction when encountering obstacles.
Active perception. Continuous stability.
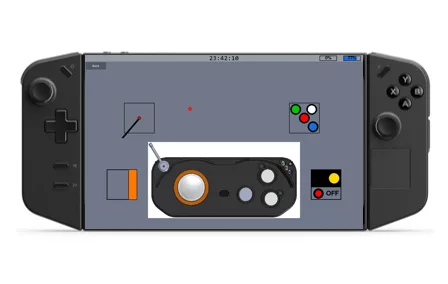
A living robot
This module centralizes vision and interactivity. It features a wide-angle camera with night vision and a distance sensor. Interaction is managed through movable mechanical elements: simulated zoom, a retractable laser, and a rotating antenna.
MultiMount
360° System


The chassis features four universal mounting points (MultiMount) on the top and bottom surfaces. This configuration allows for the addition of complementary modules or payloads without modifying the main structure.
Accroches normalisées
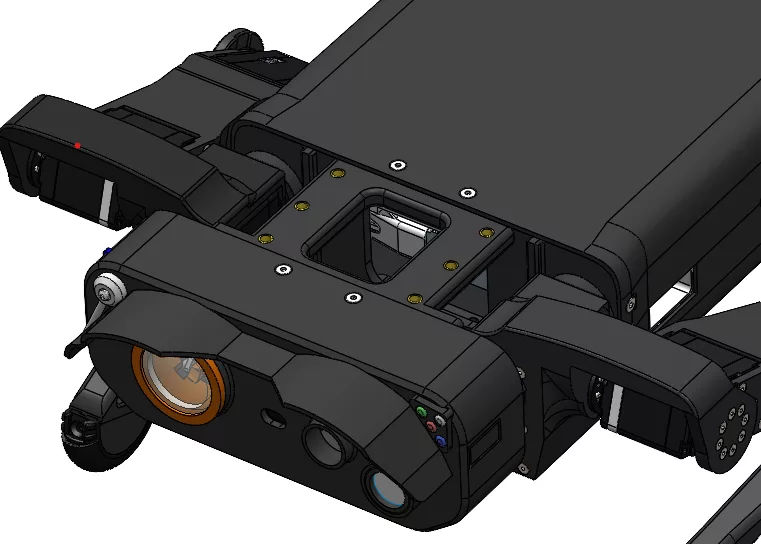
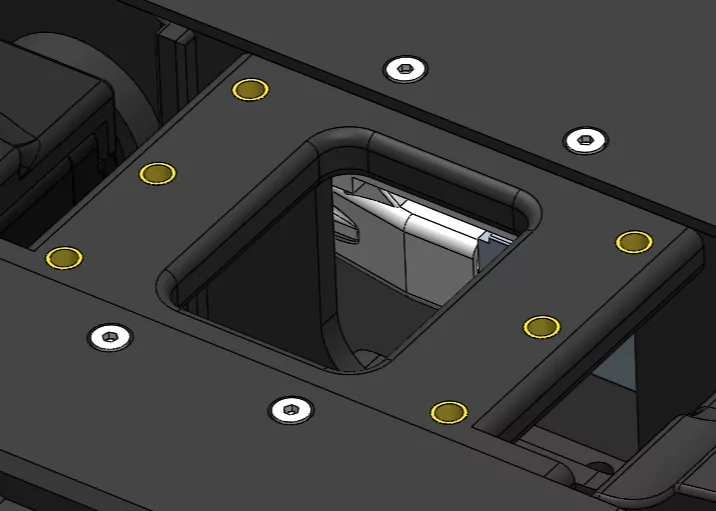
The MultiMount interface was designed for durability and versatility. It features a 6-point mounting pattern and a passage for cable routing, sensor installation, and more.
Possibilités infinies
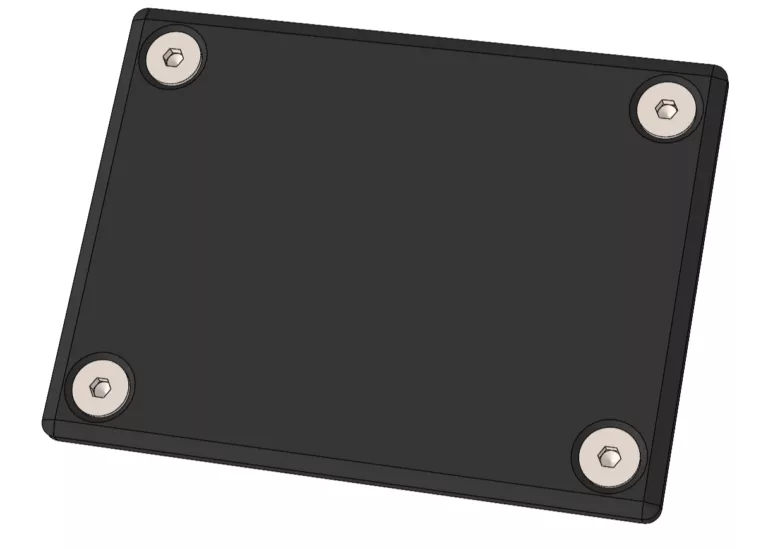
Simple cover

Integration of an emergency stop button
Support for charging dock and carrying case
Flexible Power Supply
Swappable batteries
Le bloc batterie est conçu pour être retiré et remis en place instantanément. Ce système permet de relancer le robot immédiatement avec un pack chargé sans avoir à ouvrir le châssis.
Zéro attente. Changement direct.
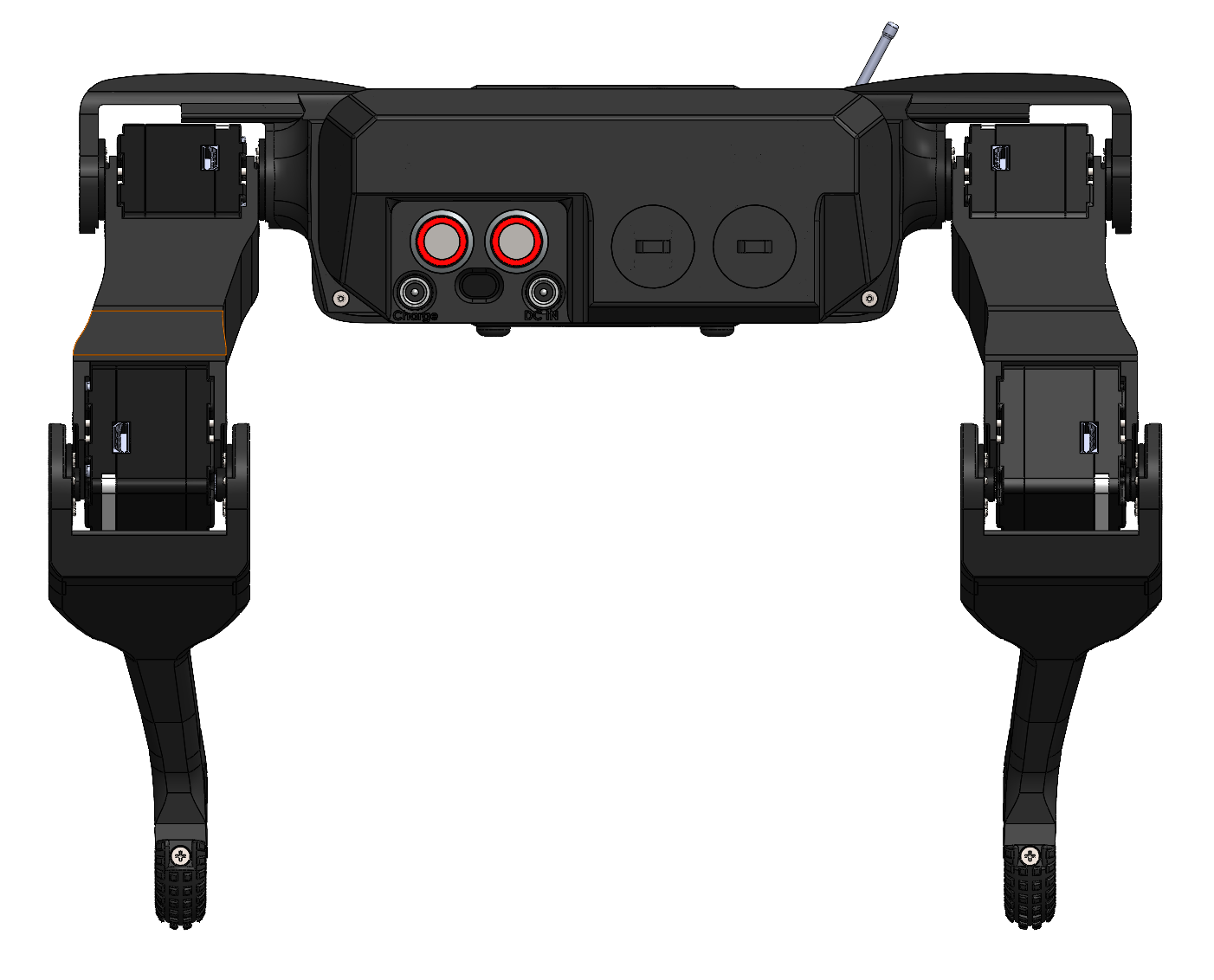
Wired power
Le robot intègre deux entrées distinctes pour une gestion directe de l’énergie.
– Port de charge : Recharge de la batterie interne.
– Alimentation directe : Usage sur secteur pour les tests prolongés.
Gestion hybride. Usage fixe ou mobile.